Photogrammetry or Lidar point clouds – both have their advantages, and which one is most suitable depends on the particular application. There is one difference that distinguishes photogrammetry from Lidar, namely RGB. Photogrammetric point clouds have an RGB value for each point, resulting in a colourised point cloud. On the other hand, when it comes to accuracy Lidar is hard to beat. But not all projects require the same accuracy, which is why it is always good to do some research first before you decide which method works best for you. Acquisition time and processing time are other issues that should be taken into account. At ‘GIM International’, we have selected a series of articles that explain more about point clouds. This series gives you insight in the world of point cloud data, derived either from photogrammetry or from Lidar or from a combination of the two.
Comparing Lidar and Photogrammetric Point Clouds
Airborne Lidar and photogrammetry are both viable methods for capturing point clouds for 3D modelling of man-made hard structures. Although both methods produce point clouds, the manner of capturing data differs in many ways, resulting in point clouds with differing characteristics. In this article, the author evaluates Lidar and photogrammetric point clouds captured from unmanned airborne systems for inspecting a flood control structure. Read on…
OBIA and Point Clouds
Object-based Image Analysis (OBIA) has been developed to improve the accuracy of conventional, pixel-based classification of multispectral images. Introduced around the year 2000 and implemented in various software packages such as eCognition, OBIA has been successfully applied for mapping land cover, forest and agricultural areas. Today, not only high-resolution multispectral images are available but increasingly also high-density 3D point clouds captured by airborne Lidar. Is OBIA also suited for the semi-automatic classification of Lidar point clouds? Read more about the promising prospects. Read on…

Recently, researchers started to apply OBIA to point clouds. To be suited for OBIA, point clouds usually have to be converted from a 3D representation to a 2D representation in the form of a raster, or 2.5D, that is a raster with one height value added to each grid cell. Such representations are suitable for further analysis.
Future-proof Data Storage for Huge Point Clouds
Point cloud datasets have proven to be useful for many applications, ranging from engineering design to asset management. While point clouds are becoming denser and more accurate, new software is allowing an ever-broader user group for these datasets. However, due to their size and dependence on specialised tools, data management of point clouds is still complicated. A major consideration for data managers is the choice of point cloud storage format, as several different formats are available. Read on…
Overcoming the Bottlenecks of Today’s Dense Point Clouds
NUBIGON is a start-up company with offices in Turkey and Austria that has developed powerful reality capture software. The company’s solution visualises Lidar and photogrammetric point clouds in real time and in full HD, while retaining the accurate precision that is needed by many professionals who are working with point clouds. GIM International decided to interview Murat Arikan, the company’s ambitious founder and lead software developer, to find out more. Read on…
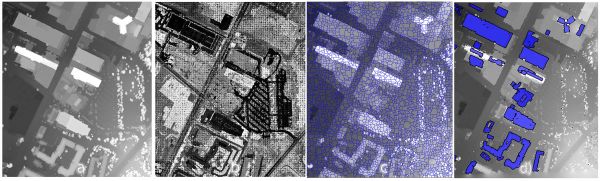
Classifying Buildings from Point Clouds and Images
The reconstruction of building outlines provides useful input for land information systems. In a city in northern Greece, a mixed commercial and residential area of 33 hectares was selected as a test area to evaluate the classification of buildings. Two data sources were available: airborne Lidar and aerial photographs. These data sources were processed to create two separate point clouds. Comparison of the results shows that both data sources can be used for building classification, although more development is needed to improve the robustness of dense image matching. Read on…
Poles from Point Clouds
Currently, the extraction of objects from point clouds of urban sites is commonly done manually as automation is impeded by noise, clutter, occlusions and varying point density. The authors of this article have developed a software tool for automatic detection of road signs, lampposts, utility poles, traffic lights and other pole-like objects based on the open-source Point Cloud Library. The results appear to be encouraging. Read on…

An SVM (support vector machine)-based machine learning library can be used for object recognition of point cloud data.
Point Clouds from Smartphones
Smartphones are omnipresent, and many people can no longer do without them. Smartphone cameras capture images suited for generating point clouds and 3D models. Apps running on smartphones and software running on a remote server enable easy 3D modelling from multiple images. The challenge is to train and guide laymen through a proper image capture strategy using their smartphones. The authors of this article investigated the potential use of smartphones for cheap and rapid generation of point clouds and 3D models exploiting a collaborative approach. Read on…
Last updated: 31/05/2018
Go to Source
Go to Source