
Accelerating Time-to-Safety for Autonomous Vehicles: Our Investment in Parallel Domain
![]() Jim AdlerBlockedUnblockFollowFollowingDec 6
Jim AdlerBlockedUnblockFollowFollowingDec 6
The future of autonomous mobility is bright — and as I’ve written before — we’re backing startups that have launched self-driving shuttles in certain restricted, Operational Design Domains (ODDs), on public roads. Still, there are significant roadblocks to clear for broad Level 4 and 5 autonomy with a high degree of safety and reliability.
As our analyst Chris Abshire outlined in a blog post earlier this year, a 2016 report by RAND found that autonomous vehicles (AVs) would need to be driven billions of miles to demonstrate acceptable reliability that meets or surpasses today’s safety standards. Gill Pratt, CEO of the Toyota Research Institute (TRI) and Toyota AI Ventures board member, believes we need to aim for trillion-mile reliability using combined closed course, public road, and simulation driving. Regardless of the exact figure, many researchers caution that it will take decades to not only gather this data, but also label the objects generated from those miles.
The time and money costs of collecting and labelling all that data are prohibitively high. But beyond the costs, there are critical edge cases that are difficult to capture or too dangerous to recreate on the road, like a person darting out into traffic. There must be a better way to efficiently reproduce the sheer complexity and scale of our roads so that we can simulate these critical edge cases in a safe environment.
This is the motivation for Toyota AI Ventures’ investment in Parallel Domain, a Silicon Valley-based company that is developing groundbreaking 3D environment generation software for AV simulation. We joined the $2.65 million seed round led by Costanoa Ventures and Ubiquity Ventures, with participation from RRE Ventures, and Bessemer Venture Partners.
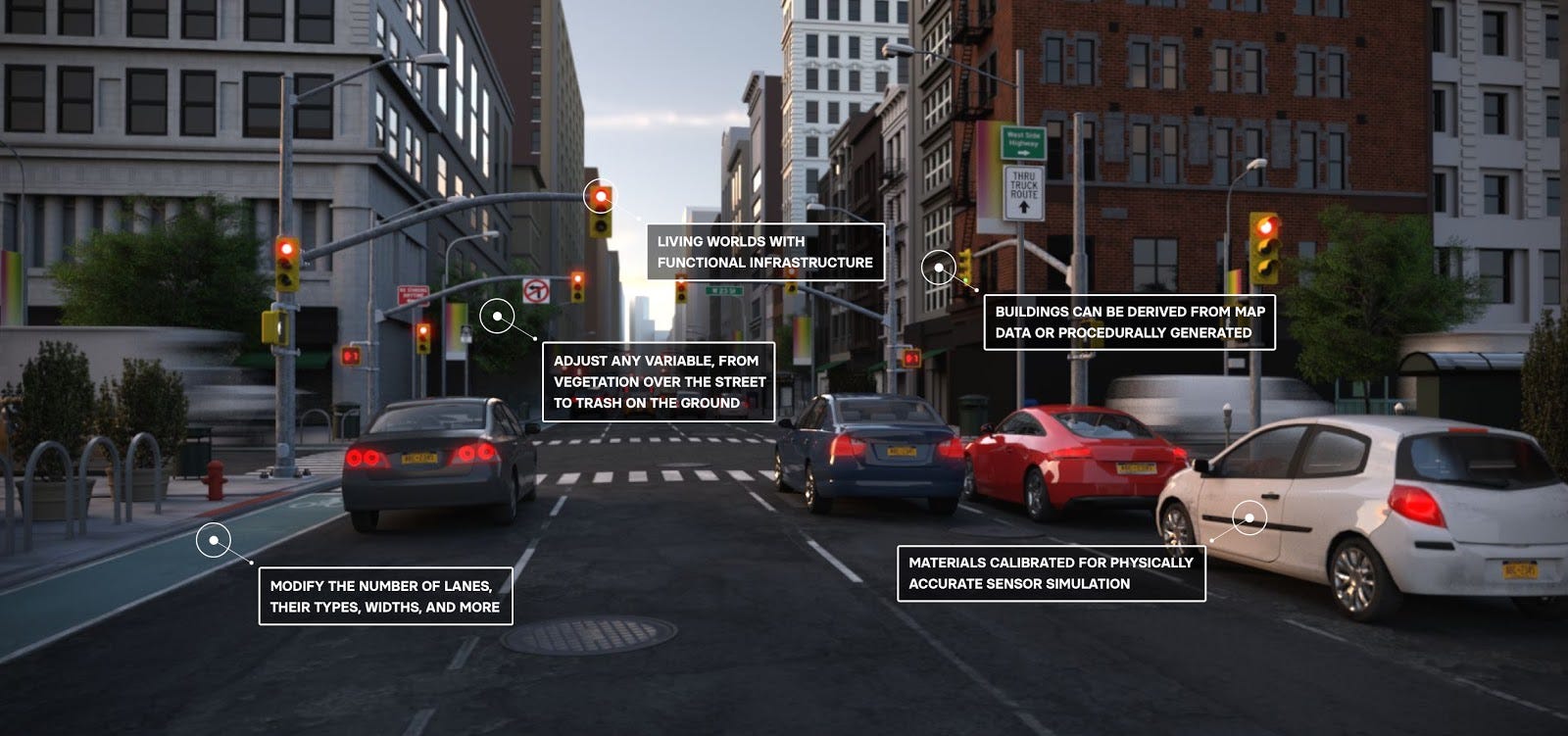
Founded in 2017, Parallel Domain automates the creation of rich virtual worlds to enable developers to deploy autonomous technology faster, more safely, and at a lower cost. The company’s software enables developers to generate a seemingly infinite variety of detailed simulation environments and dynamic scenarios based on both real and fictional locations. We believe Parallel Domain’s technology can catalyze the maturity of any autonomous simulation stack, accelerating a safer self-driving future for everyone — a vision we just love.
We’re not only impressed with their technology, but also with the Parallel Domain team. They have a clear vision for solving the problems associated with getting AVs on the road safely, and the expertise to make it happen. Founder and CEO Kevin McNamara is a computer graphics expert who worked on content generation at Pixar Animation Studios and Microsoft Game Studios before leading a team focused on autonomous systems and simulation within Apple’s Special Projects Group. It was at Apple that Kevin met James Grieve, a tech and video game industry veteran who is now Parallel Domain’s CTO.
The company continues to bring on top-notch talent in autonomous systems, simulation technology, video games, and visual effects to turbocharge their efforts [check out their job listings here], and they are already working with a broad range of AV companies, chipset manufacturers, simulation companies, and more. While the bulk of these engagements remain under wraps, they’ve announced a partnership with NIO, which is developing electric vehicles for the Chinese market, and their ecosystem partnership with NVIDIA.
It’s onwards and upwards for Parallel Domain, and we’re thrilled to be on-board with them.