

By: Peter Ondruska, Head of AV Research; and Guido Zuidhof, Software Engineer
Conference on Robot Learning (CoRL) is a relatively new conference focused on the intersection of robotics and modern machine learning. Its 3rd edition was held in Osaka, Japan at the beginning of November. Read on for a summary of the most relevant papers to self-driving.
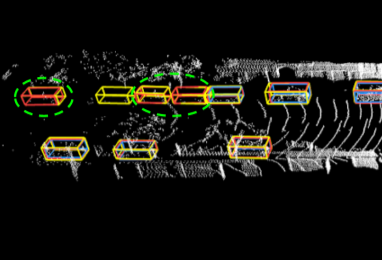
End-to-End Multi-View Fusion for 3D Object Detection in Lidar Point Clouds
Paper from Waymo — In this paper, the authors combine two approaches for process lidar readings for 3D detection: the top-down bird’s-eye-view. and the first-person view. The resulting network achieves new state-of-the-art on the Kitti dataset.
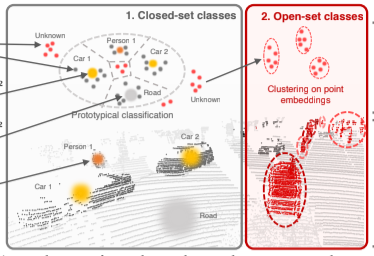
Identifying Unknown Instances for Autonomous Driving
Paper from Uber ATG — This paper outlines a method of identifying novel objects. By clustering the embedding space, the system can detect whether an object is of a known or unknown class.
Worst Cases Policy Gradients
Paper from Apple — This paper explores new method for reinforcement learning to learn policies that not only maximize reward, but also the level of safety margin. Evaluation in a simulation then shows that the self-driving vehicle will learn behaviors from most risky to most conservative.
Inferring Task Goals and Constraints using Bayesian Nonparametric Inverse Reinforcement Learning
Paper from MIT — Constraints and cost-function design for motion planning are two of the key engineering bottlenecks in motion planning. This paper shows how both constraints and cost-function could be inferred from human demonstrations.
MultiPath: Multiple Probabilistic Anchor Trajectory Hypotheses for Behavior Prediction
Paper from Waymo — This paper considers the ability to predict the future trajectory of an observed vehicle. Unlike previous approaches, the distribution is modelled as a mixture of gaussians, resulting in fast inference.
Learning by Cheating
Paper from University of Texas — In this paper, authors describe a new method for training neural networks to drive a car from camera input based on human demonstrations. This is the first method that achieve 100% success rate for the first time on the CARLA simulation benchmark.
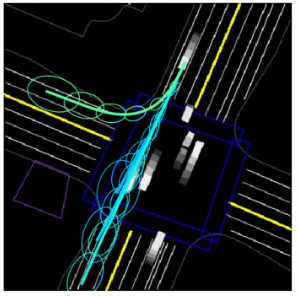
Discrete Residual Flow for Probabilistic Pedestrian Behavior Prediction
Paper from Uber ATG — The presented method predicts the future poses of pedestrians around the car. Unlike previous methods, the network can capture multi-modal distribution of future trajectories and make predictions over long time horizons.
[ → Read 8 more relevant papers from CoRL]
If this post caught your interest, we’re hiring! Check out our open roles here, and be sure to follow our blog for more technical content.
Self-Driving Research in Review: CoRL 2019 was originally published in Lyft Level 5 on Medium, where people are continuing the conversation by highlighting and responding to this story.