The WORMS system is designed to navigate the moon’s South Pole, which has complex terrain and potential water sources.
MIT engineers have designed a walking lunar robot cleverly inspired by the animal kingdom. The “mix-and-match” system is made of worm-like robotic limbs astronauts could configure into various “species” of robots resembling spiders, elephants, goats and oxen. The team won the Best Paper Award last week at the Institute of Electrical and Electronics Engineers (IEEE) Aerospace Conference.
WORMS (Walking Oligomeric Robotic Mobility System) is one team’s vision of a future where astronauts living on a moon base delegate activities to robotic minions. However, to avoid “a zoo of machines” with various robots for every task imaginable, the modular WORMS would allow astronauts to swap out limbs, bases and appendages for the task at hand. For example, they could snap together a spider bot to crawl inside hazardous lava tubes to drill for frozen water or assemble an elephant-like pack robot to haul heavy equipment. They could even make a goat / ox combination to transport solar panels. And when they finish the task, they can disassemble it and return it to storage until it’s needed for something else.
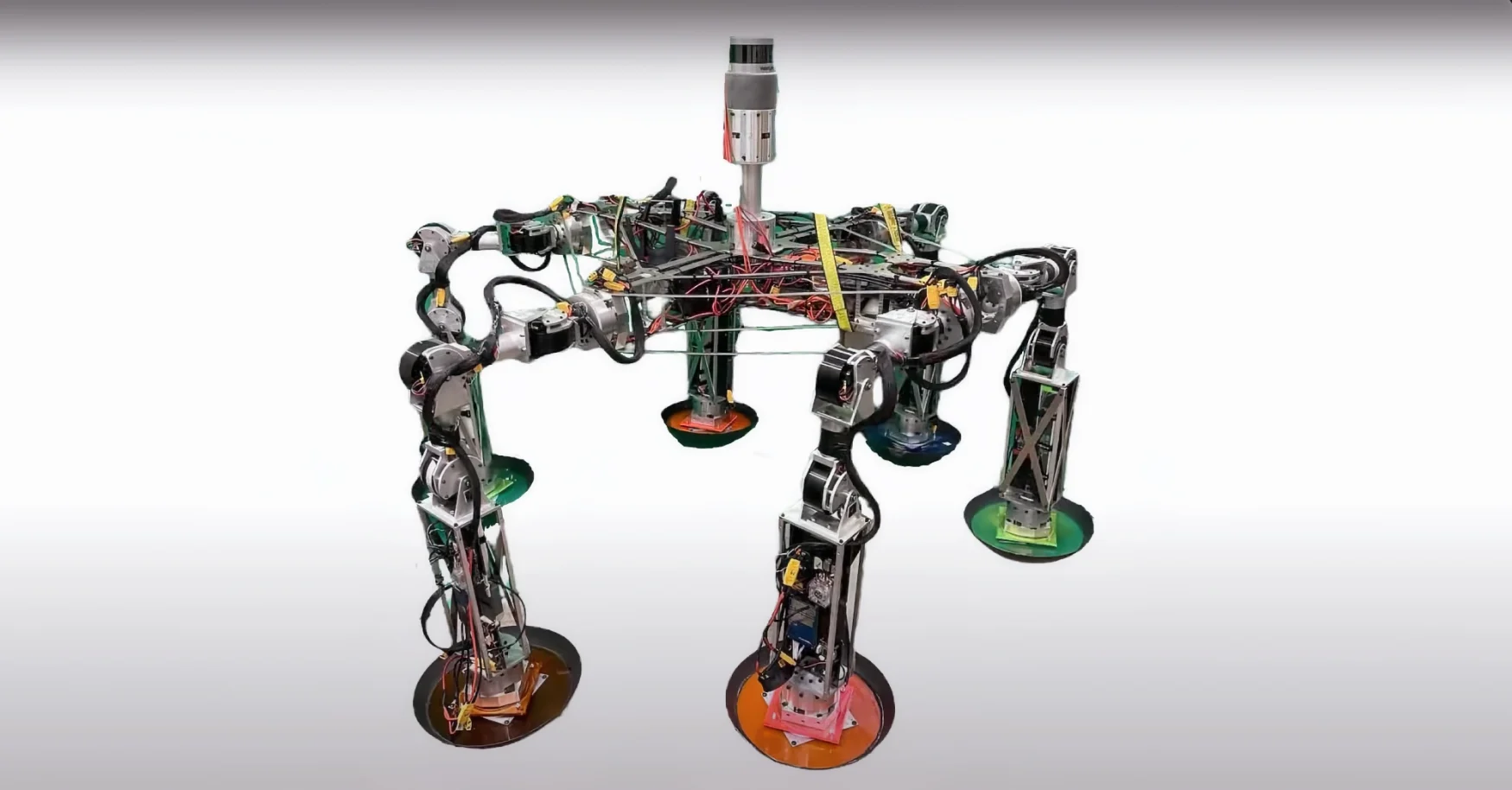
The system includes a worm-like appendage, which can snap together with a chassis through a twist-and-lock mechanism. Wok-shaped “shoes” can then snap onto the appendage’s other end. Finally, a small tool allows astronauts to release the block’s spring-loaded pins when it’s time to disassemble. The team has already developed a six-legged prototype, about the size of a go-cart, using software that coordinates multiple worm limbs. They’ve successfully demonstrated assembly, disassembly and navigation in a recent field test.
“Astronauts could go into the shed, pick the WORMS they need, along with the right shoes, body, sensors and tools, and they could snap everything together, then disassemble it to make a new one,” said George Lordos, Ph.D. candidate and graduate instructor at MIT’s Department of Aeronautics and Astronautics. “The design is flexible, sustainable and cost-effective.”
MIT
The team spawned the idea in 2022 as their answer to NASA’s Breakthrough, Innovative and Game-changing (BIG) Idea Challenge, an annual competition for university students to conjure innovative ideas. In that year’s edition, NASA challenged students to develop robots to move across extreme terrain without wheels. The MIT team focused on a lunar robot that could navigate the moon’s South Pole, which some suspect could include frozen water — essential for astronauts’ long-term survival — but also complex terrain with thick dust, rocky slopes and lava tubes.
As the students brainstormed solutions, they drew inspiration from the animal kingdom. “As we were thinking of these animal inspirations, we realized that one of the simplest animals, the worm, makes similar movements as an arm, or a leg, or a backbone, or a tail,” says deputy team leader and AeroAstro graduate student Michael Brown. “And then the lightbulb went off: We could build all these animal-inspired robots using worm-like appendages.”
Although each WORMS appendage weighs about 20 pounds on Earth, they would be only about three pounds in the moon’s atmosphere, making it easy for astronauts to assemble, disassemble and reassemble them like a high-tech Lego set. The team is already working on a second-generation model with longer and slightly heavier appendages, with an eye on heavy-equipment hauling bots.
“There are many buzz words that are used to describe effective systems for future space exploration: modular, reconfigurable, adaptable, flexible, cross-cutting, et cetera,” said Kevin Kempton, an engineer at NASA’s Langley Research Center and judge of the 2022 BIG Idea Challenge. “The MIT WORMS concept incorporates all these qualities and more.”