By: Peter Ondruska, Head of AV Research and Vladimir Iglovikov, Software Engineer
Neural Information Processing Systems (NeurIPS) is one of the largest machine learning conferences in the world. There’s such high interest in attending that tickets are distributed through a lottery system!
If you weren’t able to make it, you’re in luck. We’ve collected the most relevant self-driving-related papers from the Workshop on Machine Learning for Autonomous Driving and the conference itself.
Machine Learning for Autonomous Driving Workshop
Urban Driving with Conditional Imitation Learning [blog]
Paper from Wayve — This paper describes a new end-to-end self-driving machine learning system trained from 30 hours of human demonstrations and tested on new roads.
Radar and Camera Early Fusion for Vehicle Detection in Advanced Driver Assistance Systems
Paper from Qualcomm — Authors describe an end-to-end neural network approach that combines radar and camera data for more accurate object detection.
Joint Triangulation and Mapping via Differentiable Sensor Fusion
Paper from Uber — Authors of this paper were able to detect and estimate the position of traffic signs using camera and noisy GPS data. The system uses a variation of an expectation-maximization algorithm to reason about positions and their observation.
Visibility Guided NMS: Efficient Boosting of Amodal Object Detection in Crowded Traffic Scenes
Paper from Mercedes-Benz — This paper covers a new non-maxima suppression stage in object detection improves performance on occluded objects.
Benchmarking Robustness in Object Detection: Autonomous Driving when Winter is Coming [code]
Paper from University of Tübingen — This paper covers how injecting noise from dataset augmentations improves the performance of object detectors.
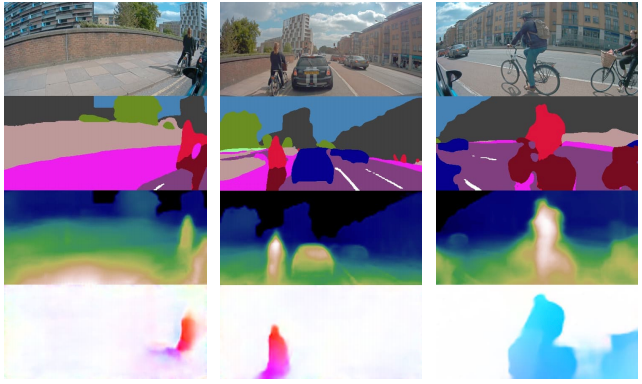
Improving Movement Prediction of Traffic Actors using Off-road Loss and Bias Mitigation
Paper from Uber — Authors of this paper incorporate novel off-road loss and standard bias mitigation techniques to improve the performance of deep learning-based vehicle movement prediction.
Efficient Black-box Assessment of Autonomous Vehicle Safety
Paper from Trustworthy AI — Authors of this paper connect Comma AI’s autopilot system to a CARLA simulator to determine likely failure cases and their frequencies.
Robust Imitative Planning: Planning from Demonstrations Under Uncertainty
Paper from University of Oxford — This paper models the distribution of known scenarios and incorporates the knowledge into an imitation learning-based system. Demonstrations in Carla showed increased robustness in new scenarios.
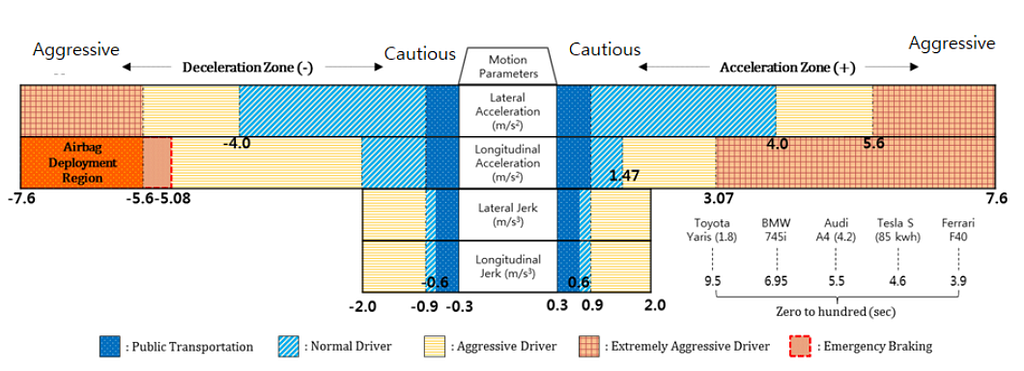
Self-Driving like a Human driver instead of a Robocar: Personalized comfortable driving experience for autonomous vehicles
Paper from Incheon — Researchers in this study experiment with incorporating users’ preferences for lateral and longitudinal acceleration into self-driving systems.
StarNet: Targeted Computation for Object Detection in Point Clouds
Paper from Google & Waymo — This paper covers a way to speed up object detection based on their distance and point cloud density.
A Reinforcement Learning Based Algorithm for Multi-hop Ride-sharing: Model-free Approach
Paper from Purdue University — Researchers show how to optimize the matching between drivers and riders in ride-hailing by allowing riders to change cars during the journey. The results showed 30% lower cost and 20% higher fleet utilisation.
Learn more at the Workshop Website.
Conference
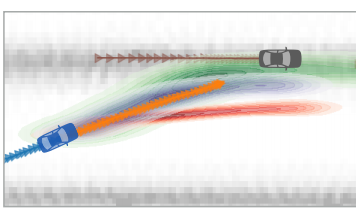
Multiple Futures Prediction
Paper from Apple — This paper explores a framework for predicting the future movement of vehicles. It captures interaction and causal relationships between different actors.
AutoAssist: A Framework to Accelerate Training of Deep Neural Networks [code]
Paper from University of Texas — Authors of this paper sought to improve the speed of training neural networks by identifying and training on only the most informative samples. Results suggest 30–40% decrease in the training time.
Towards Interpretable Reinforcement Learning Using Attention Augmented Agents
Paper from DeepMind — This paper explores the result of including an attention mechanism in a reinforcement learning system. Based on the evaluation of the attention mask on ATARI games, authors show it is possible to identify what information the system is using to make a decision.
Search on the Replay Buffer: Bridging Planning and Reinforcement Learning [code]
Paper from CMU, Google and Berkeley — Authors of this paper show how implementing a planning algorithm into reinforcement learning can increase the ability to achieve goals that require many intermediate steps.
On Single Source Robustness in Deep Fusion Models [code]
Paper from University of Texas — Authors of this paper use a new loss to improve the robustness of fusion algorithms so that perception is more robust if noise only affected one channel.
[ → Read 17 more relevant papers from NeurIPS]
If this post caught your interest, we’re working to apply best practices from research across the industry at Lyft. Come join us. Check out our open roles here, and be sure to follow our blog for more technical content.